Лента новостей → 3D-технологии в медицине.
В продолжение цикла выпусков, посвященных конференции по телемедицине в штате Луизиана в Новом Орлеане, стоит поговорить о 3D-технологиях в медицине. Сегодня, когда мы начинаем работать с пациентом, то, в первую очередь, с точки зрения выполнения манипуляций используем различные медицинские диагностические приборы и исследования, из которых получаем данную информацию. Очень точными являются компьютерная томография, магнитно-резонансная томография, позитронно-эмиссионная томография, а также – совмещение с компьютерной томографией. Эта информация, к сожалению, нами получается однократно и используется как информация, полученная в статистическом формате.
Если мы нашли с помощью этой информации, к примеру, некое новообразование, к которому хотим получить доступ – к опухоли или к кисте, то мы можем опираться на данные, полученные с помощью компьютерной и магнитно-резонансной томографии. Но, к сожалению, эта информация статична, и у нас нет доступа к динамически изменяющимся параметрам. Современные технологии позволяют нам совмещать информацию, которую мы получили с помощью методов лучевой диагностики с ультразвуковой информацией, получаемой в онлайн-режиме, которую во время операции мы можем использовать для навигации.
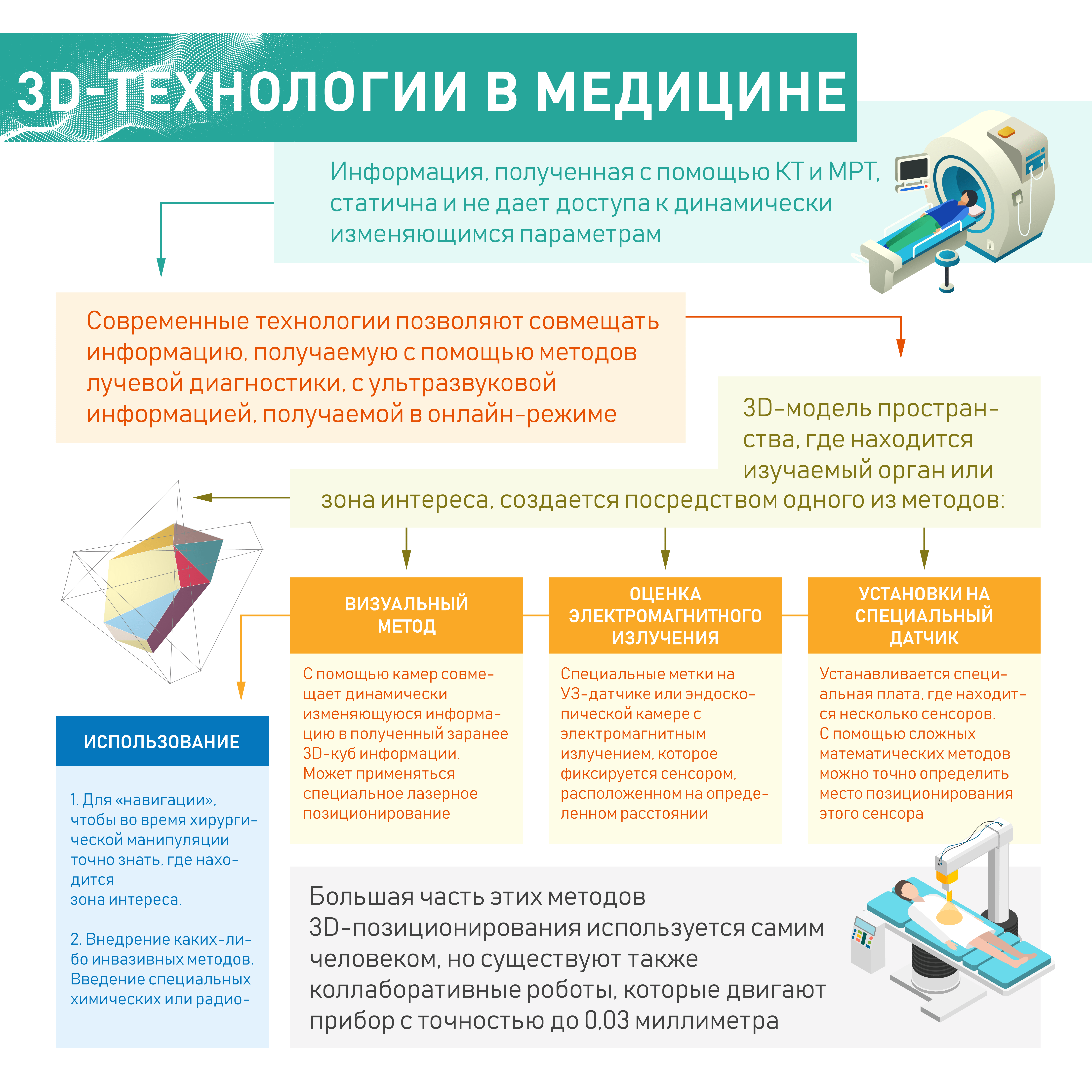
Происходит это следующим образом. Мы предварительно используем определенный метод исследования, загружаем данные в специально подготовленную информационную систему, с помощью которой делается 3D-модель некоего пространства, где находится изучаемый орган или часть какого-то анатомического образования. Эту систему мы привязываем к системе координат. Программное обеспечение и специальные технологии позволяют определять точку, где находится этот источник информации. Более всего мы можем использовать ультразвуковые датчики, ультразвуковую навигацию.
Таким образом, у нас получается куб достоверной информации, снятой с высокой точностью, а также – динамически изменяющаяся информация во времени, полученная, к примеру, с помощью ультразвукового сканнера. Мы можем совместить это в единую информационную систему и во время операции точно знать, что по данным компьютерной томографии или магнитно-резонансной томографии находится наша зона интереса. С помощью ультразвукового датчика далее мы можем видеть, как продвигается, к примеру, иголка или хирургический инструмент к этой области. Совместить картинки мы можем с помощью нескольких доказавших свою эффективность методов.
Первый метод – это визуальный метод, который позволяет с помощью специальных камер, направленных на зону интереса, совместить динамически изменяющуюся информацию в полученный заранее 3D-куб информации. При этом может применяться специальное лазерное позиционирование. К примеру, у эндоскопической камеры имеются специальные 3D-метки, которые отражают информацию, и с помощью замера расстояний, которые проходит отражаемый луч, можно точно позиционировать в 3D-пространстве датчик.
Вторая технология – это оценка электромагнитного излучения. Ставятся специальные метки на ультразвуковой датчик или эндоскопическую камеру, которые излучают электромагнитное излучение, которое фиксируется сенсором, расположенном на определенном расстоянии, и измеряется расстояние, когда движется этот датчик от маяков. С помощью методов триангуляции – как, к примеру, построено 3D-позиционирование с помощью технологии ГЛОНАСС или GPS – можно определить точные координаты в 3D-пространстве этого сенсора.
Третья технология – это установки на специальный датчик, с помощью которого мы динамически оцениваем состояние ситуации во время операции. Устанавливается специальная платка, где находится несколько сенсоров: акселерометр, гироскоп и специальный сенсор, который определяет позиционирование. С помощью сложных математических методов, измеряя скорость и угол движения нашего сенсора, его позиционирование в пространстве координат, мы можем точно определить место позиционирования этого сенсора. Когда у нас есть этот куб информации, полученной с помощью заранее выполненных методов исследования, и мы уже привязали к 3D-пространству эту метку, мы должны еще совместить два отдельно существующих 3D-пространства. Для этого проводится специальная калибровка: где-то на точках, которые не изменяются, таких как нос или скулы, устанавливаются специальные метки, которые определенным образом вносят динамическую, изменяющуюся информацию в заранее созданный 3D-куб.
Используются такие методики, в первую очередь, для «навигации», чтобы во время хирургической манипуляции точно знать, где находится наша зона интереса, к которой мы движемся. Это, в первую очередь, используется для биопсии предстательной железы, почек, печени и других органов, которые располагаются в глубине, и есть необходимость взять именно с определенной точки биоптат.
Вторая методика – это внедрение каких-то инвазивных методов. К примеру – проведение перкутанной нефролитолапаксии, получение доступа к чашечно-лоханочной системе.
Еще эта методика используется для того, чтобы ввести специальные химические или радиофармпрепараты, специальные радиоактивные зерна, которые используются при низкодозной лучевой терапии при брахитерапии в отношении какого-то органа.
Большая часть этих методов 3D-позиционирования используются в ручном режиме, когда сам человек берет, к примеру, сенсор, ультразвуковой датчик или эндоскопическую камеру и начинает ее двигать. В 3D-пространстве она движется, а мы видим по полученной заранее информации с помощью компьютерной томографии или иного метода, где находится, к примеру, зона нашего интереса, кончик иглы, кончик эндоскопической камеры. Далее человек сам в ручном режиме управляет этим процессом. Однако современные технологии с использованием роботической техники позволяют это еще более автоматизировать. Есть так называемые коллаборативные роботы – у нас есть отдельный обзор возможностей коллаборативных роботов в медицине.
Вот такие коллаборативные роботы могут сами взять в руки этот сенсор или эндоскопическую камеру, чтобы впоследствии с точностью до трех сотых миллиметра двигать прибор, с помощью которого мы проводим хирургические манипуляции. Это будущее технологий, но мы уже видели, когда с помощью таких технологий проводится биопсия, к примеру, молочной железы с применением робота KUKA, который посредством ультразвука наводил определенным образом на молочную железу ультразвуковую картинку, совмещал это с заранее полученной информацией в компьютерной томографии, после чего роботизированным способом выполнялась биопсия.